KSMC-iX High-Accuracy Motion Controller
The KSMC-iX is a high-accuracy motion controller engineered for applications demanding sub-micron positioning precision and deterministic high-speed axis control. Built on a proprietary 10 Gbps fiber communication architecture, this precision motion control system delivers ultra-fast control loops with position update rates up to 50 kHz and current loop processing at 100 kHz, enabling the extreme accuracy required for EDM systems, precision CNC machining, and advanced semiconductor manufacturing equipment.
KSMC-iX System Architecture
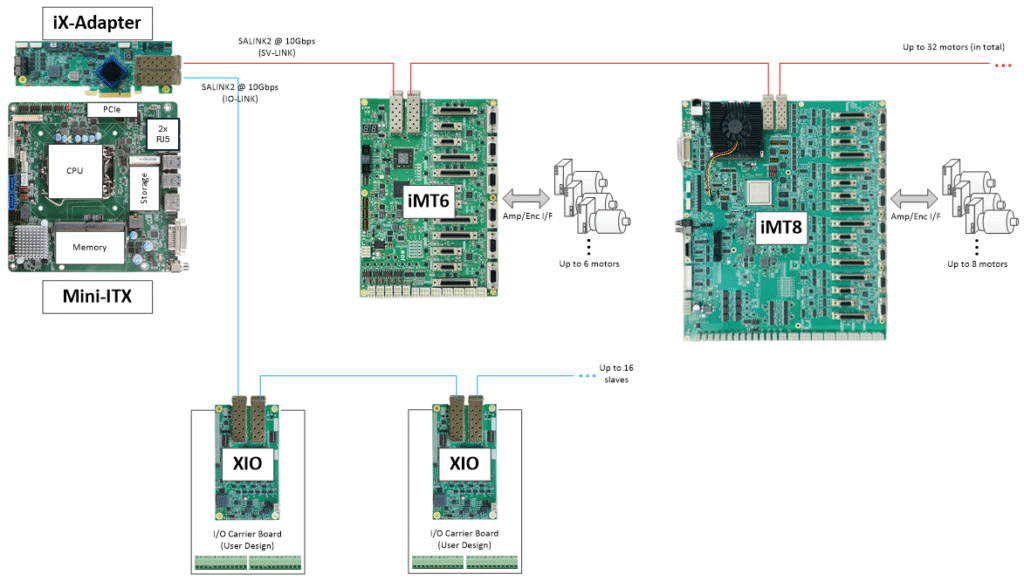
Example Configuration showing fiber-based multi-board architecture
Hardware Specification
High-Performance Controller Hardware Architecture
- Multi-board solution with 10 Gbps fiber optical communication for deterministic high-speed data transfer
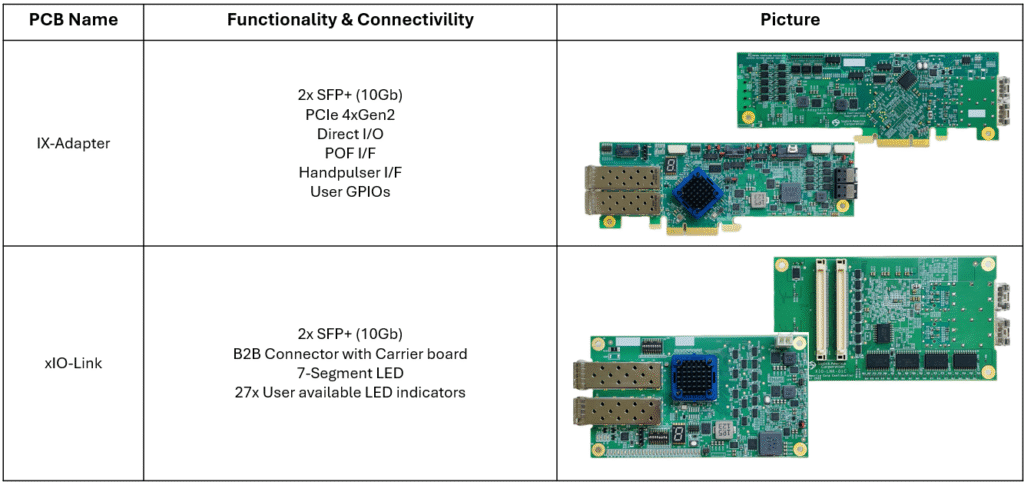
- 2× SFP+ modules for 10 Gbps communication (SALINK2 – proprietary protocol)
- Host
- Mini-iTX with a PCIe extension slot (PCIe 4x Gen2)
- iX-Adapter (PCIe extension board) as a communication interface
- Slave Modules
- xIO-Link – General-purpose communication board with B2B connector (for GPIO expansion)
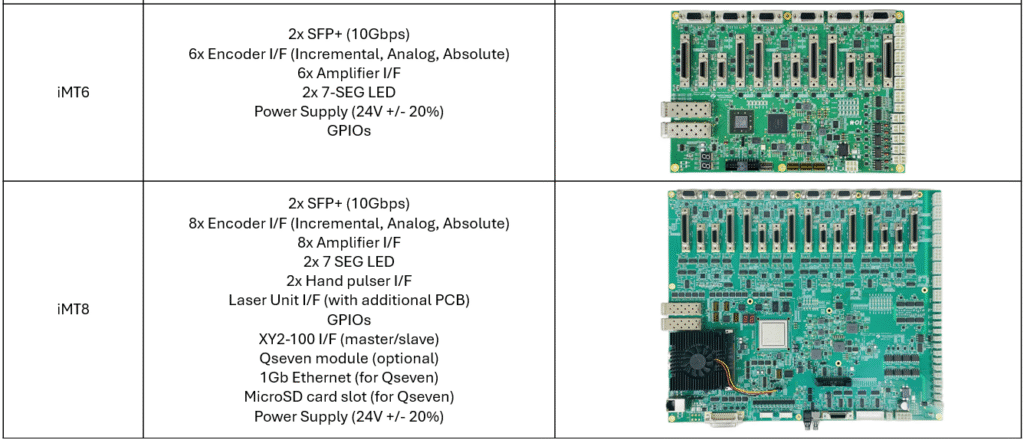
- iMT6 – Motor interface board for standard servo applications
- iMT8 – High-performance motor interface board with ARM processor on Q7 (QSeven) module
Software Specification
- RTOS (Real Time Operating System) – INtime (by TenAsys)
- Motion Controller with advanced control features (refer to specifications table)
- GPOS (General Purpose Operating System) – Windows 10/11
- User Interface (Optional)
- User Application
- OPC-UA server, MTConnect Adapter
| Feature | Description |
|---|---|
| Program | NC program with G, M, T code for EDM (Sinker and Wire), Machining Centers |
| Motion Program for high-speed axis control in Motion Coordinate System | |
| Periodic PLC for I/O control and process synchronization | |
| Controllable Motors | 32 |
| Interpolatable Axes | 8 |
| Motion Coordinate System | 4 |
| Motion Segmentation Time | >= 200 usec |
| Amplifier Interfaces Supported | PWM, Analog Linear, Pulse Train |
| Motor | AC Servo (Rotary/Linear), Stepper, DC |
| Encoder interfaces supported | Incremental, Analog, Absolute (EnDat, Tamagawa) |
| Move Mode | Jog, Homing, Trigger, Spline, Linear, Rapid, CW, CCW, PVT |
| Controller | Position/Velocity control: Conventional PID, Modern Control Theory (Disturbance Observer, Sliding Mode Controller, Adaptive Control) |
| Current Control: PI control in FPGA | |
| Controller Update Cycle/ Freq | Postion/Velocity Loop: >= 20 usec (50 KHz) |
| Current Loop: >= 10 usec (100 KHz) |
Board Interface Details
Comparison with EtherCAT-Based Motion Controllers
The KSMC-iX uses a proprietary 10 Gbps fiber protocol for applications requiring maximum performance and deterministic control beyond EtherCAT capabilities. For systems where EtherCAT network integration, distributed I/O architecture, or PLC convergence are priorities, our EM3 and EM4 controllers provide deterministic real-time control with industry-standard network compatibility.
Frequently Asked Questions
The KSMC-iX is used for precision manufacturing applications requiring sub-micron positioning accuracy, ultra-fast control loops, and deterministic multi-axis synchronization. Primary applications include EDM systems (wire and sinker), high-precision CNC machining centers, semiconductor equipment, and advanced automation systems where standard motion controllers cannot achieve the required accuracy or response times.
The controller’s 10 Gbps fiber architecture and 50 kHz position loop update rate enable control of complex multi-axis systems with timing precision measured in microseconds. This performance level is essential for applications like wire EDM, where electrode positioning accuracy directly impacts surface finish and dimensional tolerance, or precision grinding, where thermal drift and mechanical vibration must be compensated in real-time.
Sodick Corporation uses the KSMC-iX as the control platform for its world-class EDM machines, validating the controller’s performance in production environments where precision and reliability are non-negotiable.
The KSMC-iX achieves high accuracy through three architectural elements: ultra-fast control loops with 20 µsec position updates (50 kHz), advanced control algorithms including disturbance observer and sliding mode control, and deterministic 10 Gbps fiber communication that eliminates timing jitter between the host and motor interface boards.
Key accuracy enablers:
- Ultra-fast servo loops: 50 kHz position/velocity updates and 100 kHz current loop processing provide rapid response to disturbances and enable precise trajectory following
- Advanced control algorithms: Modern control theory implementation (disturbance observer, adaptive control) compensates for mechanical non-linearities, friction, and external disturbances that degrade positioning accuracy
- Deterministic communication: Proprietary SALINK2 protocol ensures consistent, predictable timing between control boards, eliminating the communication latency variations that cause position errors in networked systems
- High-resolution feedback processing: Support for absolute encoders (EnDat, Tamagawa) with sub-micron resolution enables closed-loop control at accuracy levels traditional incremental systems cannot achieve
This combination enables positioning repeatability measured in tens of nanometers and path-following accuracy that maintains tolerance across complex 3D trajectories—performance essential for precision motion control systems in semiconductor and medical device manufacturing.
For applications with less demanding accuracy requirements, our EtherCAT-based controllers provide cost-effective solutions with industry-standard network integration.
The KSMC-iX supports up to 32 motors with 8 axes capable of coordinated interpolation, making it suitable for complex multi-axis machines, including 5-axis CNC centers, multi-spindle EDM systems, and automated production equipment requiring synchronized motion across multiple stations.
Control capacity breakdown:
- Total motors: 32 individual servo motors with independent position, velocity, or current control
- Interpolated axes: 8 axes with coordinated trajectory generation for simultaneous multi-axis motion
- Motion coordinate systems: 4 independent coordinate systems enabling parallel control of multiple machine sections
- I/O expansion: Modular xIO-Link boards scale digital and analog I/O to match application requirements
The distinction between motors and interpolated axes is important: all 32 motors receive independent servo control with 50 kHz update rates, but coordinated interpolation (where multiple axes follow a synchronized toolpath) applies to 8 axes maximum. Additional motors operate under independent position or velocity control, suitable for auxiliary functions like tool changers, part feeders, or coolant pumps.
This architecture supports machine designs ranging from single-spindle precision grinders to complex multi-station production systems. The modular board design (iMT6 and iMT8 motor interfaces) allows system configuration to match specific motor count and performance requirements without over-specifying hardware.
The KSMC-iX executes position and velocity control loops at 20 microsecond intervals (50 kHz update rate) and current control loops at 10 microsecond intervals (100 kHz rate). These ultra-fast control loops enable the high-speed axis control and rapid disturbance rejection required for precision manufacturing applications.
Update cycle specifications:
- Position/Velocity loop: ≥20 µsec (50 kHz) – determines trajectory following accuracy and response to position errors
- Current loop: ≥10 µsec (100 kHz) – controls motor torque generation and electrical dynamics
- Motion segmentation: ≥200 µsec – defines the time resolution for trajectory interpolation and path generation
To contextualize these speeds: a 50 kHz position loop processes servo feedback and updates motor commands 50,000 times per second, or once every 20 microseconds. This enables detection and correction of position errors before they accumulate into dimensional inaccuracies. For reference, many industrial motion controllers operate at 1-4 kHz position loop rates (250-1000 µsec cycles), which is 12 to 50 times slower than the KSMC-iX.
The fast current loop (100 kHz) provides precise torque control and enables advanced techniques like feedforward compensation and disturbance observer implementation—critical for maintaining accuracy during rapid acceleration or when cutting forces vary during machining operations.
These cycle times are maintained deterministically through the SALINK2 fiber protocol and real-time operating system (INtime), ensuring consistent performance regardless of computational load or Windows application activity.
PRIMARY INDUSTRY APPLICATIONS
- EDM Manufacturing
Wire EDM and sinker EDM systems demand extreme positioning accuracy and coordinated control of electrode positioning, wire tension, and flushing systems. The KSMC-iX’s sub-micron repeatability and advanced control algorithms enable the precision required for aerospace turbine blade machining, medical implant manufacturing, and precision tooling production.
- High-Precision CNC Machining
5-axis machining centers, ultra-precision grinding systems, and micro-machining equipment use the KSMC-iX for coordinated interpolation with accuracy measured in microns. Applications include optical component manufacturing, aerospace structural parts, and medical device components where surface finish and dimensional tolerance are critical.
- Semiconductor Equipment Manufacturing
Wafer handling systems, die bonders, wire bonders, and inspection equipment require the microsecond-level synchronization and positioning repeatability that the KSMC-iX provides. The controller’s deterministic performance ensures consistent placement accuracy across millions of operations.
- Medical Device Manufacturing
Surgical instrument production, implantable device machining, and diagnostic equipment assembly benefit from the KSMC-iX’s ability to maintain tight tolerances across complex multi-axis movements while coordinating with inspection systems and quality control processes.
- Precision Research & Metrology
Coordinate measuring machines (CMMs), precision positioning stages, and research equipment requiring nanometer-level positioning use the KSMC-iX’s advanced control algorithms and ultra-fast feedback processing.
These industries share requirements for positioning accuracy beyond what standard industrial motion controllers can achieve, making the investment in high-performance controller technology essential for competitive advantage and regulatory compliance.