KSMC-EtherCAT Master Motion Controller 3 (EM3)
External Hardware-Based EtherCAT Master Motion Controller with Integrated PLC
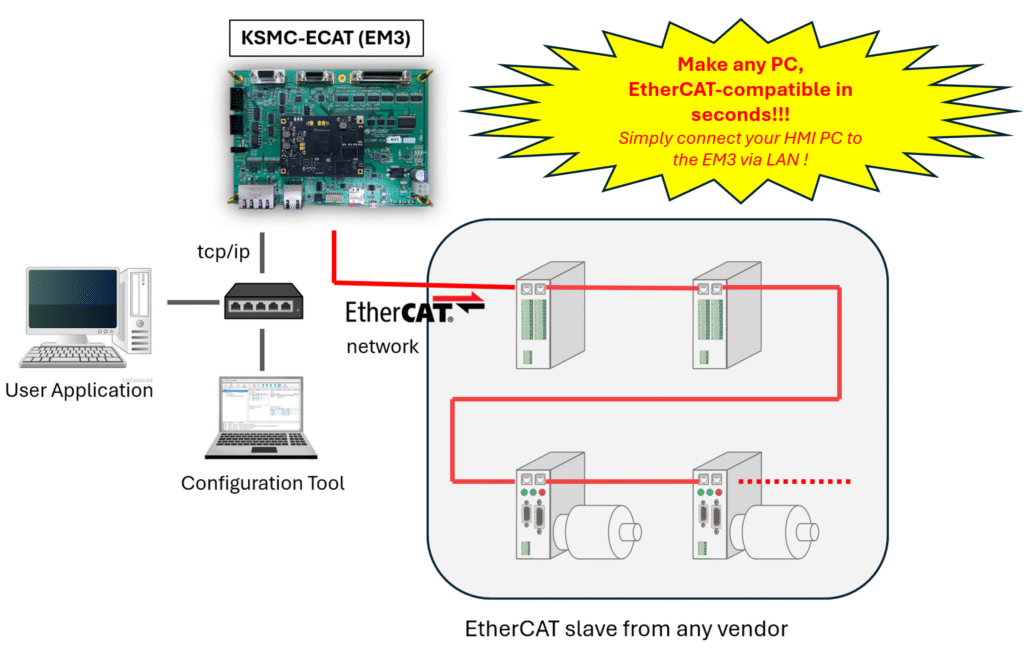
The EM3 is a hardware-based EtherCAT Master Motion Controller that transforms any PC into a deterministic multi-axis motion controller and PLC system. Built on FPGA architecture, the EM3 delivers real-time performance independent of PC operating system overhead, enabling synchronized control of up to 32 motors with integrated IEC 61131-3 PLC functionality.
System
- Dual ARM Cortex-A9 based ZYNQ System on Chip as the main processing module
- FreeRTOS Real-time operating system
EtherCAT Master Features
- Distributed Clock
- Cable Redundancy
- Deterministic and fast Process Data Object (PDO) cycle
- Supports CiA402 Drive profile
- Graphical Configuration Tool for network setup
Motion Controller
- Up to 32 motors
- Up to 16 interpolated axes
- Motor-Axis association (Axis Define)
- Motion Program execution
- Periodic PLC processing
- Various Motion Movement Types
- Data gathering for system diagnostics
Industrial Automation Software Architecture: Flexible by Design, Deterministic in Performance
Your Automation Backbone, Engineered for Control
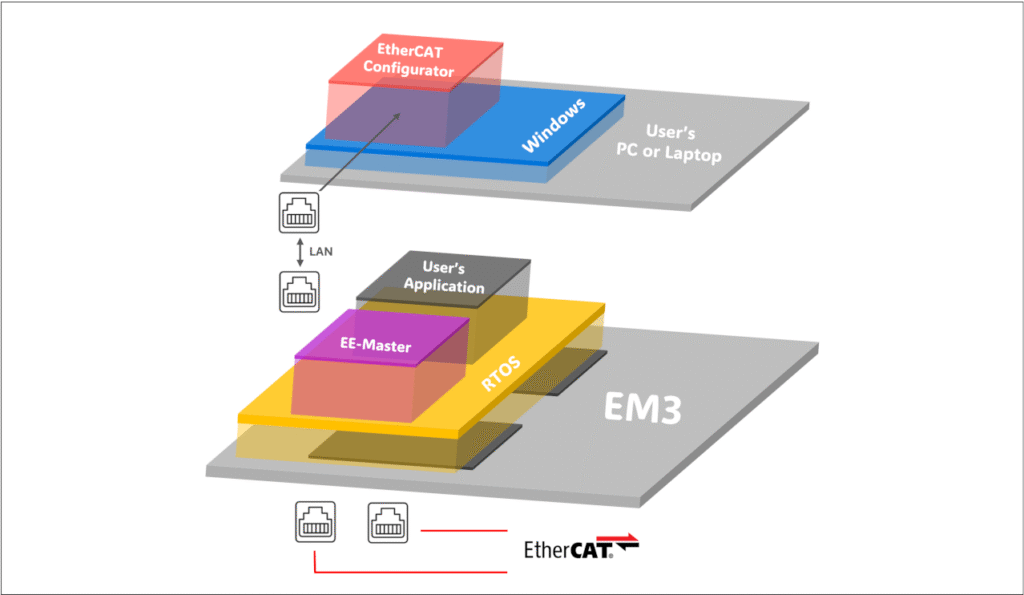
Use Case #1 - Build Custom Control Applications
Custom User Applications
Run your custom applications on top of the EE-Master and RTOS environment. Design, deploy, and control your machines with full access to EtherCAT network management and motion control APIs.
Ideal for: OEMs and engineers needing direct control over EtherCAT devices and system architecture.
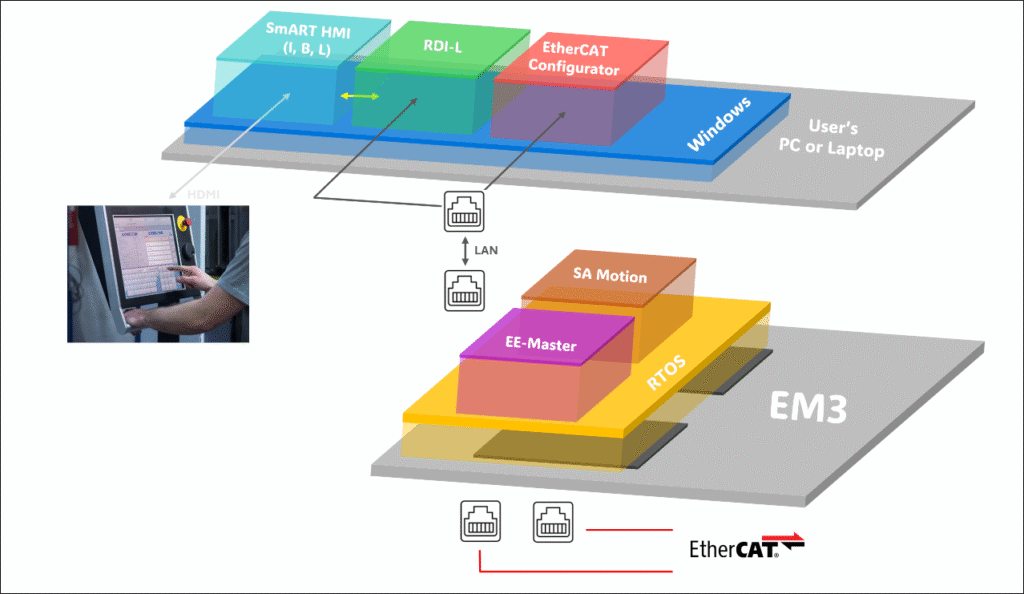
Use Case #2 – PLC EtherCAT Motion Control with SA Motion Library
Deterministic Motion Control, Field-Tested and Proven
Deploy high-performance motion control using Sodick America’s SA Motion Library, integrated with the EtherCAT Master stack. This configuration provides deterministic control for synchronized multi-axis systems, CNC applications, and precision automation.
Ideal for: Motion-centric industrial automation, CNC systems, and coordinated multi-axis applications.
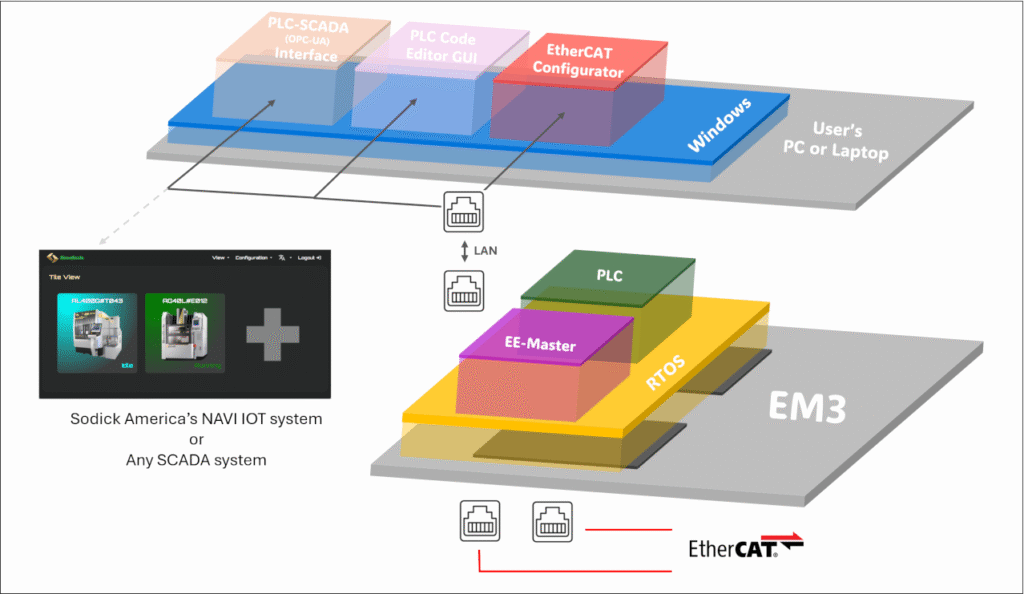
Use Case #3 – Unified PLC and Motion Control with SCADA Integration
IEC 61131-3 PLC Control with Real-Time Monitoring
Develop PLC logic using the IEC 61131-3 code editor while interfacing with SCADA systems or Sodick’s NAVI IoT dashboard. Real-time control and visualization combine motion, logic, and I/O on a single platform.
Ideal for: Smart factories, SCADA integration, and Industrial IoT solutions requiring unified motion-PLC architecture.
Comparison: EM3 vs EM4
The EM3 provides external hardware-based control for existing PC infrastructure, while the EM4 integrates the EtherCAT Master, motion controller, and industrial PC in a single ruggedized enclosure. Both deliver deterministic real-time performance—choose based on your deployment requirements.
For applications requiring even higher performance or proprietary communication protocols, explore the KSMC-iX Motion Controller with 10 Gbps fiber connectivity.
Fully Tested EtherCAT Devices
The following devices have been fully tested with the KSMC-EtherCAT Master Motion Controller.
More fully tested devices to come. If you have questions regarding the compatibility of any component, please contact us today!
Sodick America EtherCAT Master Motion Controller (Product – EM3)
Frequently Asked Questions
An EtherCAT master coordinates real-time communication between the motion controller and all connected devices on the EtherCAT network, including servo drives, I/O modules, and sensors. The master manages network timing, synchronizes distributed clocks, and ensures deterministic data exchange with microsecond-level precision.
In a motion control system, the EtherCAT master enables synchronized multi-axis coordination by ensuring all servo drives receive position commands and return feedback simultaneously. This deterministic communication is essential for applications like CNC machining or robotic motion where timing variations between axes would degrade precision and path accuracy.
The EM3’s hardware-based EtherCAT master processes network communication independently of the PC CPU, ensuring consistent cycle times regardless of PC computational load or operating system scheduling delays.
Hardware-based EtherCAT masters like the EM3 provide deterministic real-time performance independent of PC operating system overhead, while PC-based software masters are subject to scheduling delays and computational load variations that can disrupt timing precision.
Key advantages of hardware-based architecture:
- Deterministic cycle times: FPGA-based processing ensures consistent communication cycles regardless of PC activity
- Lower latency: Dedicated hardware eliminates operating system context switching delays
- System isolation: Network timing remains stable even during PC-intensive tasks like HMI rendering or data logging
- Reliability: Hardware-based masters continue EtherCAT communication even if PC application software encounters errors
This architectural separation allows engineers to use standard Windows or Linux PCs for application development and visualization while maintaining industrial-grade real-time control. The EM3 handles time-critical EtherCAT communication and motion processing, while the PC manages non-deterministic tasks like user interface and data management.
For applications requiring complete integration in a single platform, the EM4 industrial PC solution combines both functions in a ruggedized enclosure.
Yes, EtherCAT is specifically designed for high-speed precision motion control, with cycle times as fast as 62.5 microseconds and distributed clock synchronization accurate to sub-microsecond levels. These performance characteristics make EtherCAT the preferred communication protocol for CNC systems, semiconductor equipment, and precision assembly applications.
Performance capabilities:
- Fast update rates: 62.5 µs to 250 µs cycle times enable servo update frequencies of 4 kHz to 16 kHz
- Synchronized motion: Distributed clock ensures all axes receive commands simultaneously with timing jitter below 1 microsecond
- Low communication overhead: High-efficiency frame processing enables control of 32+ axes without bandwidth limitations
- Deterministic latency: Predictable, consistent timing enables look-ahead processing and path optimization
The EM3’s multi-axis motion controller architecture supports coordinated interpolation across up to 16 axes, making it suitable for complex 5-axis machining, robotic motion control, and synchronized production line automation where multiple machines must maintain precise timing relationships.
Applications demanding even higher performance can use our KSMC-iX controller with proprietary 10 Gbps communication.
Yes, the EM3 provides integrated motion control and IEC 61131-3 PLC functionality on a single hardware platform, eliminating the need for separate motion controllers and PLCs in most industrial automation applications. This unified architecture simplifies system design, reduces hardware costs, and improves performance by eliminating communication delays between separate controllers.
Unified capabilities include:
- Motion control: Coordinated multi-axis trajectories, electronic gearing, cam profiles, and position/velocity control for up to 32 motors
- PLC processing: IEC 61131-3 logic execution supporting ladder logic, structured text, and function block diagrams
- Real-time synchronization: Motion commands and PLC logic execute on the same deterministic cycle, ensuring coordinated control
- I/O processing: Direct EtherCAT I/O integration for sensors, safety devices, and process control
This PLC EtherCAT motion control convergence is particularly valuable in machine tools, packaging equipment, and automated assembly systems where motion and process logic must interact with minimal latency. Engineers program both motion and logic using integrated industrial automation software tools, reducing development complexity and debugging time.
For applications requiring only motion control without PLC functionality, the EM3’s modular software architecture allows deployment of motion-only configurations. Learn more about our complete EtherCAT control solutions.
EtherCAT motion controllers are deployed in precision manufacturing equipment where synchronized multi-axis control, deterministic communication, and scalable architecture provide competitive advantages in accuracy, throughput, and flexibility.
Common applications:
- CNC machine tools: Machining centers, lathes, EDM systems requiring coordinated 3- to 5-axis motion with sub-micron positioning
- Semiconductor equipment: Pick-and-place, die bonders, wire bonders needing microsecond synchronization across multiple positioning stages
- Packaging machinery: Form-fill-seal equipment, cartoners, and labeling systems requiring electronic line shaft control and coordinated motion
- Robotic systems: Assembly cells, material handling robots, and collaborative robots with coordinated multi-axis trajectories
- Medical device manufacturing: Precision dispensing, laser processing, and automated assembly requiring deterministic motion control
- Printing and converting: Web handling, rotary die cutting, and digital printing systems with synchronized multi-motor control
These machines share requirements for precise timing coordination between multiple axes, integration of motion with process I/O and safety systems, and scalability from standalone machines to networked production lines.